
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- 해부
- birdweather puc
- 노래
- 울새
- 깃축융기
- compsognathus
- 계절이동
- birdnet pi
- 진화
- 팔색조
- 발생
- 비행
- birdnet
- 시조새
- 생태
- merlin bird id
- birdweather
- 깃털
- 생리
- birdnet analyzer
- 꿈
- 난관
- syrinx
- 구조색
- 기낭
- song
- 부리
- 에너지
- 차골
- ebird
- Today
- Total
새에 대한 이야기
다양한 비행 방식 본문
새는 단순히 날개를 퍼덕여 하늘을 나는 존재가 아닙니다. 오랜 시간에 걸쳐 각 종의 생태적 필요에 따라 다양한 비행 전략을 진화시켜 왔으며, 그 복잡성과 정교함은 포유류가 걷고 뛰며 달리는 다양한 방식에 비견될 수 있습니다. 본 글에서는 활상과 활공 비행에서부터 복잡한 날갯짓 비행, 벌새의 정지 비행, 그리고 간헐적 비행에 이르기까지 다양한 비행 형태를 체계적으로 살펴봅니다.
1. 활상과 활공 비행 (Soaring and Gliding Flight)
독수리, 알바트로스, 매, 펠리컨 등 많은 대형 조류는 활공을 통해 에너지 소비 없이 넓은 지역을 비행할 수 있습니다. 이들은 날개짓 없이 기류를 이용해 공중을 미끄러지듯 이동하며 비행합니다. 활공하는 새는 스스로 추진력을 만들지 않기 때문에, 정지된 공기 속에서는 필연적으로 고도를 잃습니다. 이는 항력이 지속적으로 작용하여 새의 속도를 줄이고 점차 아래로 끌어당기기 때문입니다. 그러나 이러한 하강 속도는 일정하지 않으며, 항력이 가장 낮은 중간 비행 속도에서 최소화됩니다. 활공 비행이 단순히 하강을 의미하지 않는 이유도 여기에 있습니다. 글라이더와 마찬가지로, 새는 외부의 움직이는 공기—예를 들어 상승기류나 바람—를 전략적으로 활용해 이러한 불가피한 하강을 상쇄하며, 때로는 오히려 고도를 높이기도 합니다. 따라서 활공은 단순한 낙하가 아니라 공기역학적으로 정교하게 조절된 비행 방식입니다. 이러한 비행 방식은 주로 두 종류로 나뉩니다: 열적 활상과 동적 활상입니다.
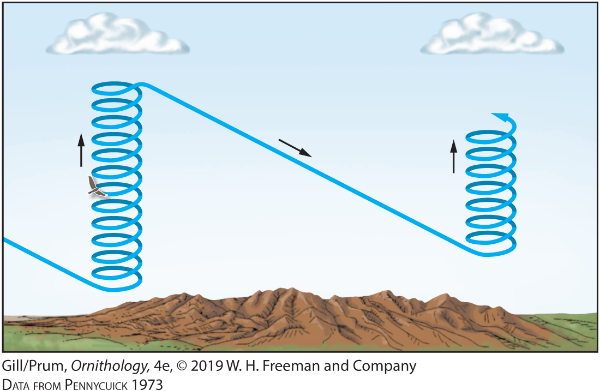
열적 활상은 햇볕에 달궈진 지표면 위로 상승하는 따뜻한 공기 기둥(열기류)을 타고 상승한 뒤, 다음 열기류까지 활공하는 방식입니다. 예를 들어, 아프리카의 독수리는 단 여섯 개의 열기만으로 1,500미터까지 상승해 75킬로미터를 활공할 수 있다고 보고된 바 있습니다. Broad-winged Hawk와 같은 이동성 맹금류는 북미에서 남미까지 장거리 이동 시 열기류를 활용해 비행 에너지 효율을 극대화합니다. 이들이 집단으로 상승할 때는 회오리처럼 보이며, 이를 ‘케틀(kettles)’이라 부르기도 합니다.
군함조처럼 해상에서 생활하는 조류는 적란운 아래의 상승기류를 타고 수천 미터까지 상승한 뒤, 한 번의 하강으로 수십 킬로미터를 활공할 수 있으며, 몇 주에서 몇 달간 지상에 거의 내려오지 않고 공중에 머무르기도 합니다.
활공에 적합한 새들은 날개 끝의 주깃 사이에 슬롯 구조가 있어, 각 깃털이 독립적인 ‘윙렛’ 역할을 수행하며 유도 항력을 줄여줍니다. 이는 현대 항공기, 예를 들어 보잉 737-400 이후 모델의 윙렛 설계에도 응용된 원리입니다.
동적 활상은 바람이 만들어내는 이동 기류를 이용한 비행입니다. 매, 까마귀는 산 능선을 따라 흐르는 바람을 타고 오르며, 갈매기는 해안가나 선박 뒤의 바람을 이용해 거의 힘들이지 않고 비행합니다. 알바트로스는 S자 모양의 비행 패턴을 통해 큰 파도 위로 부는 바람을 가로질러 상승과 하강을 반복하며 기계적인 에너지 소비 없이 수천 킬로미터에 달하는 장거리 비행을 수행합니다.
2. 날갯짓 비행 (Flapping Flight)
날갯짓 비행은 공기 중에서 능동적으로 추력을 생성해 앞으로 나아가는 방식으로, 대부분의 조류가 기본적으로 사용하는 비행 방식입니다. 날개를 아래로 내리치는 다운스트로크에서 주된 추력이 발생하며, 이때 날개의 받음각을 조절해 전방으로 향하는 양력을 만들어냅니다.
날개의 모양과 각도는 날갯짓 주기 동안 시시각각 변하며, 알룰라(날개의 앞쪽, 엄지 위치에 해당하는 깃털)를 펴면 앞전 슬롯이 형성되어 실속을 방지하고 공기 흐름을 안정화합니다. 이는 착륙이나 이륙 시 매우 중요한 기능으로, 현대 항공기에도 유사한 구조가 탑재되어 있습니다.
비행 중 조류는 몸의 방향, 속도, 고도를 정밀하게 제어하며, 이는 각각의 날개를 독립적으로 조작할 수 있기 때문에 가능합니다. 한쪽 날개를 접거나 펼쳐 회전하거나 선회하고, 날개의 접는 정도로 고도를 서서히 조절하며, 날개를 비대칭으로 조작해 기민한 방향 전환을 수행합니다.
날개 움직임은 약 50개의 근육에 의해 조절되며, 각 근육은 접기, 펴기, 위로 당기기, 아래로 누르기, 방향 전환 등 각기 다른 역할을 담당합니다. 이로 인해 다양한 날갯짓 ‘걸음걸이’가 형성되며, 이는 비행의 상황에 따라 최적화된 방식으로 활용됩니다.
저속에서는 '링 와류'라고 불리는 도넛 모양의 와류(아래 그림 A)를 생성하며, 고속에서는 연속적인 후류 와류(아래 그림 B)를 형성하여 효율을 높입니다. 날갯짓 속도는 너무 느려도, 반대로 너무 빨라도 비행 효율에 부정적인 영향을 미칩니다. 날개를 너무 천천히 움직이면 날개 뒤에 형성된 난기류가 반동을 일으켜 추진력을 방해하고, 너무 빠르면 이러한 난기류가 다음 날갯짓(업스트로크)에 간섭해 비행의 안정성을 해칩니다. 그래서 대부분의 새는 날갯짓 속도를 무작정 높이는 대신, 날개를 더 넓게 펴거나 각도를 조절해 한 번의 날갯짓으로 더 큰 양력과 추력을 만들어냅니다. 이는 에너지를 효율적으로 쓰면서도 필요한 비행력을 확보하는 전략입니다.

날개의 움직임이 비행의 중심 역할을 한다면, 꼬리는 이를 보완하며 섬세한 조정과 안정성을 담당합니다. 꼬리가 작은 종에서는 그 기여가 상대적으로 작을 수 있지만, 많은 조류에게 꼬리는 비행 위치를 조정하고 방향을 바꾸거나 속도를 줄이는 데 중요한 역할을 합니다. 특히 느린 속도에서는 꼬리가 날개 주위의 공기 흐름을 안정화시키고, 체표면을 따라 흐르는 공기에서 발생하는 난기류와 유도 항력을 줄여 양력을 증대시키는 효과도 가집니다.
이러한 기능은 특히 비행을 배우는 어린 새들에게 더욱 중요하게 작용합니다. 예를 들어, 미숙한 맹금류는 성체보다 상대적으로 꼬리가 더 긴 경향이 있으며, 이는 동아프리카의 바텔루르나 북미의 붉은꼬리매처럼 꼬리가 짧은 종에서 더 뚜렷하게 나타납니다. 이 차이는 최대 15%까지 관찰됩니다. 더 긴 꼬리는 비행 시 부력을 증가시켜 보다 안정적인 조종이 가능하게 하며, 이는 어린 새가 먹이를 사냥할 때 부상 위험을 줄이고 비행 기술을 익히는 데 큰 도움이 됩니다. 연구에 따르면, 이러한 추가 양력은 초기 생존과 학습에 중요한 기여를 합니다(
3. 벌새의 비행 (Hummingbird Flight)
벌새는 정지 비행(호버링)을 완벽하게 수행할 수 있는 유일한 조류입니다. 이들은 수평으로 날개를 8자 형태로 박동하며, 업스트로크와 다운스트로크 양쪽 모두에서 양력을 생성합니다. 벌새의 날개 구조는 특이하게 상완골이 짧고 외익이 길며, 날개의 회전을 가능케 하는 관절 구조 덕분에 모든 방향으로 자유로운 박동이 가능합니다.
이로 인해 벌새는 제자리에서 공중에 떠 있는 것은 물론 전진, 후진, 수직 상승과 하강을 모두 수행할 수 있으며, 날개 각도와 캠버의 세밀한 조정으로 이러한 기동을 실현합니다. 디지털 입자 영상 유속계(DPIV)를 활용한 최근 연구에 따르면, 호버링 중 벌새는 양력을 거의 대칭적으로 생성하지만 여전히 다운스트로크가 약 70%의 체중을 지탱한다고 합니다.
벌새는 초당 50~80회의 날갯짓을 하며, 이러한 빠른 박동이 특유의 ‘허밍(humming)’ 소리를 만들어냅니다. 이 진동은 탄성 기반의 운동으로, 일정한 주파수를 유지한 채 에너지 효율을 높이는 방식입니다.
4. 간헐적 비행 (Intermittent Flight)
간헐적 비행은 날갯짓을 멈췄다가 다시 시작하는 방식으로, 대표적으로 플랩-글라이딩(flap-gliding)과 플랩-바운딩(flap-bounding)이 있습니다. 플랩-글라이딩은 큰 새들, 예컨대 매나 독수리에서 주로 보이며 날개짓 후 날개를 펴고 활공하는 자세이며, 플랩-바운딩은 딱따구리나 핀치류 같이 중소형 새에게서 관찰되며 날개짓 후 날개를 접는 자세를 말합니다.
이 방식은 비행 중 에너지 소비를 줄이기 위한 전략으로, 속도와 비행 모드에 따라 선택적으로 사용됩니다. 플랩-글라이딩은 느린 속도에서, 플랩-바운딩은 빠른 속도에서 더 효과적입니다. 찌르레기 같은 새는 속도에 따라 두 방식 사이를 전환하기도 하며, 유럽 딱따구리는 바운딩 비행을 사용하는 가장 큰 조류로 알려져 있습니다.
요약
조류의 비행은 생태적 적응의 결과로, 활상 및 활공, 날갯짓, 호버링, 간헐적 비행의 네 가지 방식으로 분류됩니다. 각 방식은 기류 활용, 근육 조절, 날개 구조와 운동의 조합을 통해 실현되며, 기동성과 에너지 효율성 측면에서 고도로 정교화되어 있습니다. 새는 생존과 이동, 사냥과 번식에 이르기까지 다양한 목적을 달성하기 위해 비행을 능동적으로 조절하는 뛰어난 비행 동물입니다.
'행동 > 비행' 카테고리의 다른 글
| 비행의 진화 (0) | 2025.05.08 |
|---|---|
| 비행에 적응한 골격,근육과 신진대사 (0) | 2025.05.07 |
| 날개의 크기와 형태가 생태에 미치는 영향 (0) | 2025.05.06 |
| 비행의 에너지 역학 (0) | 2025.05.05 |
| 새의 비행에 관한 일반 원리 (0) | 2025.05.03 |



